Регулятор оборотів колекторного двигуна без втрат
 Для виконання багатьох видів робіт по обробці деревини, металу або інших типів матеріалів потрібні невисокі швидкості, а хороше тягове зусилля. Правильніше буде сказати – момент. Саме завдяки йому заплановану роботу можна виконати якісно і з мінімальними втратами потужності. Для цього в якості приводного пристрою застосовуються мотори постійного струму (або колекторні), в яких випрямлення напруги живлення здійснюється самим агрегатом. Тоді для досягнення необхідних робочих характеристик необхідне регулювання обертів колекторного двигуна без втрати потужності.
Для виконання багатьох видів робіт по обробці деревини, металу або інших типів матеріалів потрібні невисокі швидкості, а хороше тягове зусилля. Правильніше буде сказати – момент. Саме завдяки йому заплановану роботу можна виконати якісно і з мінімальними втратами потужності. Для цього в якості приводного пристрою застосовуються мотори постійного струму (або колекторні), в яких випрямлення напруги живлення здійснюється самим агрегатом. Тоді для досягнення необхідних робочих характеристик необхідне регулювання обертів колекторного двигуна без втрати потужності.
Особливості регулювання швидкості
Важливо знати, що кожен двигун при обертанні споживає не тільки активну, а й реактивну потужність. При цьому рівень реактивної потужності буде більше, що пов'язане з характером навантаження. В даному випадку завданням конструювання механізмів регулювання швидкості обертання колекторних двигунів є зменшення різниці між активною і реактивною потужностями. Тому подібні перетворювачі будуть досить складними, і самостійно їх виготовити непросто.
Своїми руками можна сконструювати лише деяку подобу регулятора, але говорити про збереження потужності не варто. Що таке потужність? З точки зору електричних показників, цей твір споживаного струму, помножене на напругу. Результат дасть якесь значення, яке включає активну і реактивну складові. Для виділення тільки активною, тобто відомості втрат до нуля, необхідно змінити характер навантаження на активну. Такими характеристиками володіють тільки напівпровідникові резистори.
отже, необхідно індуктивність замінити на резистор, Але це неможливо, тому що двигун перетвориться у щось інше і явно не стане приводити щось в рух. Завдання регулювання без втрат полягає в тому, щоб зберегти момент, а не потужність: вона все одно буде змінюватися. Справитися з подібним завданням зможе тільки перетворювач, який буде керувати швидкістю за рахунок зміни тривалості імпульсу відкриття тиристорів або силових транзисторів.
Узагальнена схема регулятора
 Прикладом регулятора, який здійснює принцип управління мотором без втрат потужності, можна розглянути тиристорний перетворювач. Це пропорційно-інтегральні схеми зі зворотним зв'язком, які забезпечують жорстке регулювання характеристик, починаючи від розгону-гальмування і закінчуючи реверсом. Найефективнішим є імпульсно-фазовий управління: частота проходження імпульсів відмикання синхронізується з частотою мережі. Це дозволяє зберігати момент без зростання втрат в реактивної складової. Узагальнену схему можна представити декількома блоками:
Прикладом регулятора, який здійснює принцип управління мотором без втрат потужності, можна розглянути тиристорний перетворювач. Це пропорційно-інтегральні схеми зі зворотним зв'язком, які забезпечують жорстке регулювання характеристик, починаючи від розгону-гальмування і закінчуючи реверсом. Найефективнішим є імпульсно-фазовий управління: частота проходження імпульсів відмикання синхронізується з частотою мережі. Це дозволяє зберігати момент без зростання втрат в реактивної складової. Узагальнену схему можна представити декількома блоками:
- силовий керований випрямляч;
- блок керування випрямлячем або схема імпульсно-фазового регулювання;
- зворотний зв'язок по тахогенератором;
- блок регулювання струму в обмотках двигуна.
Перед тим як заглиблюватися в більш чітке визначення та принцип регулювання, необхідно визначитися з типом колекторного двигуна. Від цього буде залежати схема управління його робочими характеристиками.
Різновиди колекторних двигунів
Відомо, як мінімум, два типи колекторних двигунів. До першого належать пристрої з якорем і обмоткою збудження на статорі. До другого можна віднести пристосування з якорем і постійними магнітами. Також необхідно визначитися, Для яких цілей потрібно сконструювати регулятор:
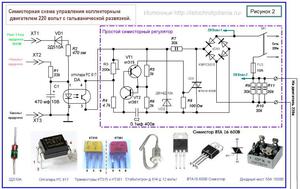
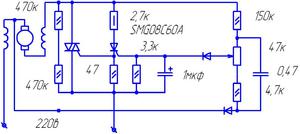
 Якщо необхідно регулювати простим рухом (наприклад, обертанням шліфувального каменю або свердлінням), то обороти потрібно змінювати в межах від якогось мінімального значення, нерівного нулю, – до максимального.Приблизний показник: від 1000 до 3000 об / хв. Для цього підійде спрощена схема на 1 тиристори або на парі транзисторів.
Якщо необхідно регулювати простим рухом (наприклад, обертанням шліфувального каменю або свердлінням), то обороти потрібно змінювати в межах від якогось мінімального значення, нерівного нулю, – до максимального.Приблизний показник: від 1000 до 3000 об / хв. Для цього підійде спрощена схема на 1 тиристори або на парі транзисторів.- Якщо необхідно управляти швидкістю від 0 до максимуму, тоді доведеться використовувати повноцінні схеми перетворювачів зі зворотним зв'язком і жорсткими характеристиками регулювання. Зазвичай у майстрів-самоучок або любителів виявляються саме колекторні двигуни з обмоткою збудження і тахогенератором. Таким мотором є агрегат, який використовується в будь-якій сучасній пральній машині і часто виходить з ладу. Тому розглянемо принцип управління саме цим двигуном, вивчивши його пристрій детальніше.
конструкція двигуна
Конструктивно двигун від пральної машини «Індезіт» нескладний, але при проектуванні регулятора керування його швидкістю необхідно врахувати параметри. Мотори можуть бути різними за характеристиками, через що буде змінюватися і управління. Також враховується режим роботи, від чого буде залежати конструкція перетворювача. Конструктивно колекторний мотор складається з наступних компонентів:
- Якір, на ньому є обмотка, укладена в пази сердечника.
- Колектор, механічний випрямляч змінної напруги мережі, за допомогою якого воно передається на обмотку.
- Статор з обмоткою збудження. Він необхідний для створення постійного магнітного поля, в якому буде обертатися якір.
 При збільшенні струму в ланцюзі двигуна, включеного за стандартною схемою, обмотка збудження включена послідовно з якорем. При такому включенні ми збільшуємо і магнітне поле, що впливає на якір, що дозволяє домогтися лінійності характеристик. Якщо поле буде незмінним, то отримати хорошу динаміку складніше, не кажучи вже про великі втрати потужності. Такі двигуни краще використовувати на низьких швидкостях, так як ними зручніше управляти на малих дискретних переміщеннях.
При збільшенні струму в ланцюзі двигуна, включеного за стандартною схемою, обмотка збудження включена послідовно з якорем. При такому включенні ми збільшуємо і магнітне поле, що впливає на якір, що дозволяє домогтися лінійності характеристик. Якщо поле буде незмінним, то отримати хорошу динаміку складніше, не кажучи вже про великі втрати потужності. Такі двигуни краще використовувати на низьких швидкостях, так як ними зручніше управляти на малих дискретних переміщеннях.
Організувавши роздільне управління збудженням і якорем, можна домогтися високої точності позиціонування вала двигуна, але схема управління тоді істотно ускладниться. Тому докладніше розглянемо регулятор, який дозволяє змінювати швидкість обертання від 0 до максимальної величини, але без позиціонування. Це може стати в нагоді, Якщо з двигуна від пральної машини буде виготовлятися повноцінний свердлильний верстат з можливістю нарізання різьби.
вибір схеми
З'ясувавши всі умови, при яких буде використовуватися мотор, можна починати виготовляти регулятор оборотів колекторного двигуна. Починати варто з вибору відповідної схеми, яка забезпечить вас всіма необхідними характеристиками і можливостями. Слід згадати їх:
- Регулювання швидкості від 0 до максимуму.
- Забезпечення хорошого крутного моменту на низьких швидкостях.
- Плавність регулювання обертів.
Розглядаючи безліч схем в інтернеті, можна зробити висновок про те, що мало хто займається створенням подібних «агрегатів». Це пов'язано зі складністю принципу управління, так як необхідно організувати регулювання багатьох параметрів. Кут відкриття тиристорів, тривалість імпульсу управління, час розгону-гальмування, швидкість наростання моменту. Даними функціями займається схема на контролері, що виконує складні інтегральні обчислення і перетворення. Розглянемо одну з схем, яка користується популярністю у майстрів-самоучок або тих, хто просто хоче з користю застосувати старий двигун від пральної машини.
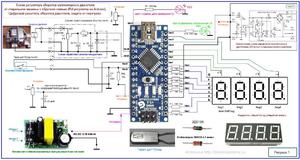
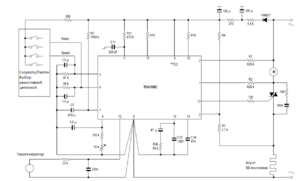
Всім нашим критеріям відповідає схема керування швидкістю обертання колекторним двигуном, зібрана на спеціалізованій мікросхемі TDA 1085. Це повністю готовий драйвер для управління моторами, які дозволяють регулювати швидкість від 0 до максимального значення, забезпечуючи підтримку моменту за рахунок використання тахогенератора.
особливості конструкції
 Мікросхема оснащена всім необхідним для здійснення якісного управління двигуном в різних швидкісних режимах, починаючи від гальмування, закінчуючи розгоном і обертанням з максимальною швидкістю. Тому її використання набагато спрощує конструкцію, одночасно роблячи весь привід універсальним, Так як можна вибирати будь-які обороти з незмінним моментом на валу і використовувати не тільки в якості приводу конвеєрної стрічки або дриля, а й для переміщення столу.
Мікросхема оснащена всім необхідним для здійснення якісного управління двигуном в різних швидкісних режимах, починаючи від гальмування, закінчуючи розгоном і обертанням з максимальною швидкістю. Тому її використання набагато спрощує конструкцію, одночасно роблячи весь привід універсальним, Так як можна вибирати будь-які обороти з незмінним моментом на валу і використовувати не тільки в якості приводу конвеєрної стрічки або дриля, а й для переміщення столу.
Характеристики мікросхеми можна знайти на офіційному сайті. Ми вкажемо основні особливості, які будуть потрібні для конструювання перетворювача. До них можна віднести: інтегровану схему перетворення частоти в напругу, генератор розгону, пристрій плавного пуску, блок обробки сигналів Тахо, модуль обмеження струму та інше. Як бачите, схема оснащена рядом захистів, які забезпечать стабільність функціонування регулятора в різних режимах.
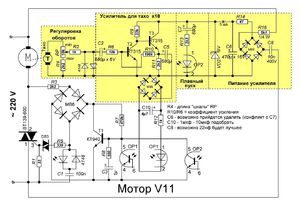
На малюнку нижче зображено типова схема включення мікросхеми.
Схема нескладна, тому цілком відтворена своїми руками. Є деякі особливості, до яких відносяться граничні значення і спосіб регулювання швидкістю:
 Максимальний струм в обмотках двигуна не повинен перевищувати 10 А (за умови тієї комплектації, яка представлена на схемі). Якщо застосувати симистор з великим прямим струмом, то потужність може бути вище. Врахуйте, що потрібно змінити опір в колі зворотного зв'язку в меншу сторону, а також індуктивність шунта.
Максимальний струм в обмотках двигуна не повинен перевищувати 10 А (за умови тієї комплектації, яка представлена на схемі). Якщо застосувати симистор з великим прямим струмом, то потужність може бути вище. Врахуйте, що потрібно змінити опір в колі зворотного зв'язку в меншу сторону, а також індуктивність шунта.- Максимальна швидкість обертання досягається 3200 об / хв. Ця характеристика залежить від типу двигуна. Схема може управляти моторами до 16 тис. Об / хв.
- Час розгону до максимальної швидкості досягає 1 секунди.
- Нормальний розгін забезпечується за 10 секунд від 800 до 1300 об / хв.
- На двигуні використаний 8-полюсний тахогенератор з максимальним вихідним напругою на 6000 об / хв 30 В. Тобто він повинен видавати 8МВ на 1 об / хв. При 15000 об / хв на ньому має бути напруга 12 В.
- Для управління двигуном використовується симистор на 15А і граничним напруженням 600 В.
Якщо буде потрібно організувати реверс двигуна, то для цього доведеться доповнити схему пускателем, який буде перемикати напрямок обмотки збудження. Також буде потрібно схема контролю нульових обертів, щоб давати дозвіл на реверс. На малюнку не вказано.
принцип управління
При завданні швидкості обертання валу двигуна резистором в ланцюзі виведення 5 на виході формується послідовність імпульсів для відмикання сімістора на певну величину кута. Інтенсивність оборотів відстежується по тахогенератором, що відбувається в цифровому форматі. Драйвер перетворює отримані імпульси в аналогове напруга, через що швидкість вала стабілізується на єдиному значенні, незалежно від навантаження. Якщо напруга з тахогенератора зміниться, то внутрішній регулятор збільшить рівень вихідного сигналу управління симистора, що призведе до підвищення швидкості.
Мікросхема може управляти двома лінійними прискореннями, що дозволяють домагатися необхідної від двигуна динаміки. Одне з них встановлюється по Ramp 6 висновок схеми. Даний регулятор використовується самими виробниками пральних машин, тому він має всі переваги для того, щоб бути використаним в побутових цілях. Це забезпечується завдяки наявності наступних блоків:
 Стабілізатор напруги для забезпечення нормальної роботи схеми управління. Він реалізований за висновками 9, 10.
Стабілізатор напруги для забезпечення нормальної роботи схеми управління. Він реалізований за висновками 9, 10.- Схема контролю швидкості обертання. Реалізована за висновками МС 4, 11, 12. При необхідності регулятор можна перевести на аналоговий датчик, тоді висновки 8 і 12 об'єднуються.
- Блок пускових імпульсів. Він реалізований за висновками 1, 2, 13, 14, 15. Виконує регулювання тривалості імпульсів управління, затримку, формування їх з постійної напруги і калібрування.
- Пристрій генерації напруги пилкоподібної форми.Висновки 5, 6 і 7. Він використовується для регулювання швидкості згідно заданому значенню.
- Схема підсилювача управління. Висновок 16. Дозволяє відрегулювати різницю між заданою і фактичною швидкістю.
- Пристрій обмеження струму з виведення 3. При підвищенні напруги на ньому відбувається зменшення кута відмикання сімістора.
Використання подібної схеми забезпечує повноцінне керування колекторним мотором в будь-яких режимах. Завдяки примусовому регулювання прискорення можна домагатися необхідної швидкості розгону до заданої частоти обертання. Такий регулятор можна застосовувати для всіх сучасних двигунів від пральних машин, використовуваних в інших цілях.