Зміст
- Кроковий двигун: особливості та принцип роботи
- Що являє собою кроковий двигун?
- Принцип роботи приводу
- Типи крокових двигунів
- Двофазні крокові двигуни
- Реактивні крокові двигуни: особливості та принцип роботи
- Синхронні лінійні крокові двигуни
- В яких режимах здатний працювати синхронний кроковий двигун?
- Особливості підключення крокової двигуна
- Ключові технічні характеристики двигунів
- Середня вартість крокової приводу в великих містах Росії і України
Кроковий двигун: особливості та принцип роботи
 Щоб той чи інший електричний прилад працював, йому потрібен спеціальний приводний механізм. Одним з таких механізмів є кроковий двигун. В даному матеріалі ви дізнаєтеся, що він собою являє, який принцип його роботи і на які категорії поділяється.
Щоб той чи інший електричний прилад працював, йому потрібен спеціальний приводний механізм. Одним з таких механізмів є кроковий двигун. В даному матеріалі ви дізнаєтеся, що він собою являє, який принцип його роботи і на які категорії поділяється.
Що являє собою кроковий двигун?
Кроковий двигун може бути уніполярним або біполярним. Він є електричним і безщітковим двигуном постійно струму, здатним ділити повний оборот на кілька однакових кроків. У нього входять такі деталі:
 спеціальний контролер для крокової приводу;
спеціальний контролер для крокової приводу;- магнітні частини;
- обмотки;
- приладова панель (вона ж виступає в ролі блоку управління);
- передавачі;
- сигналізатори.
Кроковий двигун використовується переважно для наступних цілей:
- роботи фрезерного верстата;
- роботи шліфувального верстата;
- забезпечує роботу різних побутових приладів;
- роботи виробничих механічних засобів;
- забезпечує роботу транспорту.
Принцип роботи приводу
 Принцип роботи даного приводу виглядає наступним чином. При додатку напрузі до клем, щітки на самому шаговом двигуні починають постійно рухатися. Движок холостого ходу має при цьому унікальну властивість: він перетворює вхідні імпульси, Що мають переважно прямокутну спрямованість, в заздалегідь позначене положення прикладеного ведучого вала.
Принцип роботи даного приводу виглядає наступним чином. При додатку напрузі до клем, щітки на самому шаговом двигуні починають постійно рухатися. Движок холостого ходу має при цьому унікальну властивість: він перетворює вхідні імпульси, Що мають переважно прямокутну спрямованість, в заздалегідь позначене положення прикладеного ведучого вала.
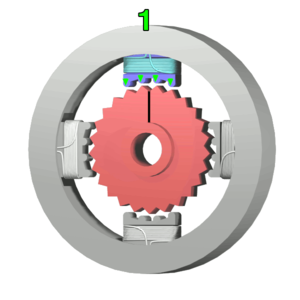
Кожен з вхідних імпульсом здатний перемістити вал під певним кутом. Прилади, які оснащені подібним редуктором, мають максимальну ефективність за умови наявності декількох зубчастих електромагнітів, які знаходяться навколо центрального залізного шматка, що має зубчасту форму. Зовнішня ланцюг управління збуджує електромагніт. При необхідності повернути вал двигуна, той електромагніт, до якого прикладена енергія, притягує до себе зуби колеса. Коли вони вирівнюються по відношенню до електромагніту, вони зміщені по відношенню до подальшої магнітної частини двигуна.
Перший електромагніт вимикається, а потім включається другий, після чого починає обертатися шестерня, вирівнюючись при цьому з попереднім колесом. потім така дія повторюється необхідну кількість разів. Кожне з таких обертань називають постійним кроком, при цьому швидкість обертання крокового двигуна можна обчислити при підрахунку кількості кроків, потрібних для повного його обороту.
Щоб контролювати роботу крокової двигуна застосовується спеціальний драйвер. Це необхідно в тих випадках, якщо ви налаштовуєте привід для роботи верстата або застосовуєте його для запуску в роботу вітрогенератора.
Типи крокових двигунів
Крокові двигуни поділяються на такі типи:
- з наявністю постійного магніту;
- синхронний гібридний привід;
- змінний двигун.
Всі вони дещо відрізняються один від одного, в тому числі і за принципами своєї роботи.
Так, наприклад, приводи з постійними магнітами оснащені спеціальною магнітною деталлю в роторі. такі двигуни працюють за принципом тяжіння або відштовхування статором і ротором мотора на основі електромагніту.
Змінний двигун має звичайний залізний ротор і робота його побудована за принципом фундаментальності. Коли допускається мінімальний рівень відштовхування з найменшим зазором, при цьому точки ротора мають тяжіння до полюсів статора.
А ось гібридний привід може поєднувати в собі обидва принципи роботи, він вважається найбільш дорогою моделлю крокових двигунів.
Двофазні крокові двигуни
 Двофазний мотор дуже простий, його можна встановити людині без спеціального досвіду. Незалежно від того, зібрали ви його самостійно або придбали в готовому вигляді, він має два типи обмотки для котушок:
Двофазний мотор дуже простий, його можна встановити людині без спеціального досвіду. Незалежно від того, зібрали ви його самостійно або придбали в готовому вигляді, він має два типи обмотки для котушок:
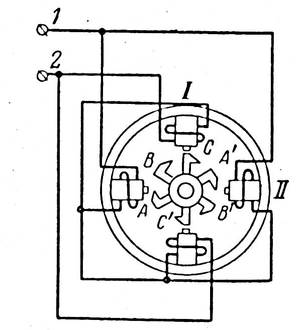
Якщо кроковий двигун має одну обмотку з центральним магнітним краном, що впливає на кожну фазу, то це уніполярний привід. Кожну обмотувальної секцію слід включити з метою забезпечення потрібного напрямку магнітного поля. В даному приводі магнітний полюс здатний функціонувати без необхідності додаткового перемикання, тому напрямку струму і ланцюгова комутація робляться дуже просто, За допомогою одного транзистора на кожну обмотку. При цьому враховуються перемикання фази:
- три дроти на фазу;
- шість на вихідний сигнал.
Мікроконтролер двигуна приводу можна застосовувати з метою активізації транзистора в тій чи іншій послідовності.
А обмотки можна також підключати за допомогою дотику проводів з'єднання разом з постійними магнітами приводу. При з'єднанні котушкові клем, повернути вал буде важко. Опір між котушковим торцем і загальним проводом дорівнює половині опору котушкові і дротових торців. Це виглядає так, оскільки загальний провід має велику довжину, ніж половинна частина, яка використовується для з'єднання котушок.
Біполярні крокові двигуни мають одну фазову обмотку, в яку струм надходить переломним способом із застосуванням магнітного полюса. Керуюча система в даному випадку буде складною з використанням з'єднує моста. На фазу є в наявності два дроти, але вони не загальні. При змішуванні сигналу крокової двигуна на високих частотах, ефект тертя системи може бути знижений.
Крім того, ще одним типом крокової двигуна є трифазний, але сфера його застосування дуже вузька:
- при роботі фрезерних верстатів з ЧПУ;
- на деяких автомобілях, де застосовується дросель;
- на дисководі і принтерах деяких марок.
Реактивні крокові двигуни: особливості та принцип роботи
 Варто зазначити, що активні крокові приводи мають великий недолік: це великий крок, що досягає декількох десятків градусів. На відміну від них, реактивні крокові двигуни здатні редукувати роторну частоту, Завдяки чому крок стає кутовим менш градуси.
Варто зазначити, що активні крокові приводи мають великий недолік: це великий крок, що досягає декількох десятків градусів. На відміну від них, реактивні крокові двигуни здатні редукувати роторну частоту, Завдяки чому крок стає кутовим менш градуси.
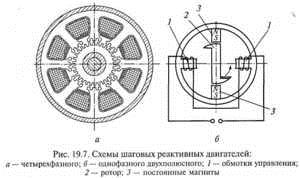
Головною особливістю реактивного приводу є те, що зубці розміщені на статорних полюсах. Синхронізуючий момент в ньому забезпечується різницею магнітних опорів по поперечній і поздовжній осі приводу.
Реактивний кроковий двигун має один ключовий недолік: в ньому відсутня синхронізуючий момент, Якщо обмотки статора знеструмлені.
Підвищити ступінь редукції двигуна, причому незалежно якого, активного або реактивного, можна при використанні многопакетних конструкцій, коли зубці статора зрушуються один на одного на частину ділення, а ротора кожного пакета не зрушуються і осі їх полюсів однакові. подібна конструкція дуже складна в плані створення і коштує в готовому вигляді недешево, також до неї потрібно складний комутатор.
На сьогоднішній день у продажу можна знайти безліч всіляких конструкцій двигунів, які відрізняються за такими параметрами, як:
- кількість фаз;
- тип розміщення обмотки;
- способи фіксації ротора і т.д.
У індукторних крокових двигунах момент обертання створюється при взаємодії магнітного поля, яке створюється статорними обмотками і постійного магніту, наявного в зубчастої частини зазору.
Синхронізуючий момент в індукторні двигуні сам по собі реактивний, завдяки чому виходить статорна обмотка, а постійний магніт здатний створювати момент фіксації, завдяки чому ротор утримується в потрібному положенні при відсутньому струмі.
На відміну від реактивного крокової двигуна, індукторний, при аналогічному кроці, має більший синхронізуючий момент, а також більш покращені технічні характеристики.
Синхронні лінійні крокові двигуни
 З метою автоматизації деяких виробничих процесів на підприємстві, іноді виникає необхідність переміщення об'єктів в площині. Щоб це зробити, потрібно використовувати спеціальний перетворювач обертального руху в поступальний, що досягається шляхом застосування кінематики.
З метою автоматизації деяких виробничих процесів на підприємстві, іноді виникає необхідність переміщення об'єктів в площині. Щоб це зробити, потрібно використовувати спеціальний перетворювач обертального руху в поступальний, що досягається шляхом застосування кінематики.
За допомогою лінійних крокових двигунів можна перетворити імпульсну команду прямо в лінійне переміщення, що значно спростить кінематичну схему всіляких електричних приводів.
Статор в даному приводі представлений у вигляді магнітомягкого плити, а дроти подмагничивающего шляхом роботи постійного магніту.
Зубцеві поділу в статорі і рухомої частини однакові, при цьому вони можуть бути зміщені на половину ділення в межах одного проводу ротора. Потік подмагничивания і його магнітне опір, в даному випадку, не залежать від того, де знаходиться рухома частина двигуна.
Щоб перемістити об'єкт в площині згідно двох координатах, застосовують двигуни двокоординатного типу.
Також в лінійних двигунах використовується магнітно-повітряна підвіска. Завдяки силі магнітного тяжіння ротор притягається до статора. далі під ротор крізь форсунки нагнітають повітря в стислому вигляді, внаслідок чого з'являється сила, відразлива ротор від статора. Так між ними виникає повітряна подушка і ротор висить над статором з наявністю мінімально зазору. Це і забезпечує мінімум опору руху ротора і високоточне позиціонування.
В яких режимах здатний працювати синхронний кроковий двигун?
 Привід здатний працювати стійко за умови відсутності втрат кроків під час відпрацювання кута при подачі на обмотки управління імпульсних серій. При відпрацюванні кожного кроку ротор має впевнене рівновагу по відношенню до вектора магнітної індукції, що відноситься до магнітного поля статора.
Привід здатний працювати стійко за умови відсутності втрат кроків під час відпрацювання кута при подачі на обмотки управління імпульсних серій. При відпрацюванні кожного кроку ротор має впевнене рівновагу по відношенню до вектора магнітної індукції, що відноситься до магнітного поля статора.
Режим відпрацювання кожного кроку повинен відповідати кількості імпульсів управління, які подаються на обмотки приводу, а він при цьому, до моменту приходу наступного імпульсу, повинен відпрацювати поставлене йому кут обертання. На початку кожного з кроків кутова рухова швидкість повинна бути нульовою.
Допускаються коливання кутового приводного вала по відношенню до сталого значення. Вони обумовлюються наявністю кінетичної енергії, яка накопичується руховим валом під час відпрацювання кута. При цьому енергія здатна перетворюватися в втрати:
Чим більше їх величина, тим швидше закінчується процес переходу відпрацювання одного кроку приводом.
При запуску ротор може мати відставання від статорної потоку на крок і навіть більше, внаслідок чого виходить розбіжність між кількістю роторних кроків і статорних потоком.
Ключові характеристики крокової двигуна – це:
- крок;
- гранична механічна характеристика;
- прийомистість.
Гранична характеристика являє собою залежність максимально можливого синхронизирующего моменту від частот керуючих імпульсів.
А приемистостью називається частота цих імпульсів, яка виключає можливість втрат або додавань кроку під час обробки. приемистость вважається ключовим показником режиму переходу в двигуні. Вона здатна рости разом з синхронизирующим моментом, зниженням кроку, інерційним моментом лінійно переміщуються або обертаються часток, а також статичного моменту опору.
Особливості підключення крокової двигуна
 Підключити двигун крокової типу можна по тій чи іншій схемі, яка залежить від кількості проводів і способів запуску.
Підключити двигун крокової типу можна по тій чи іншій схемі, яка залежить від кількості проводів і способів запуску.
Двигуни можуть мати від чотирьох до восьми проводів. Якщо їх всього чотири, то застосування двигуна можливо тільки з біполярним пристроєм. Кожна фазная обмотка, яких всього дві, оснащена двома проводами. Визначати провідні пари слід з використанням метра, потім підключається драйвер покроковим методом.
Мотор, оснащений шістьма проводами, включає в себе два дроти для кожної обмотки і центральний кран, теж для кожної з них. Його можна підключати і до однополярного, і до біполярного пристрою. Для поділу приводу слід застосовувати спеціальний прилад для вимірювання. До однополярного пристрою привід можна підключати з використанням всіх шести проводів, а до однополярного буде достатнього одного кінця і одного центрального крана від кожної обмотки.
П'ятипровідні мотор практично не відрізняється від попереднього, проте, його центральні клеми зсередини з'єднані як один суцільний кабель і мають один вихід до одного з проводів. Не слід відокремлювати обмотки один від одного, інакше можна їх розірвати. Замість цього краще визначити центр дроти і з'єднати його з іншими провідниками, це буде максимально ефективне рішення підключення. Після цього можете підключати сам пристрій і перевіряти його на працездатність.
Ключові технічні характеристики двигунів
 Первинна обмотка при постійному струмі створює номінальну напругу. А первісна швидкість крутного моменту приводу змінюється разом зі струмом. Від того, яка схема двигуна і від індуктивності його обмоток залежить час зниження лінійного моменту на більш високих швидкостях. Деякі марки двигунів, що мають ступінь захисту IP65, здатні працювати в найважчих умовах.
Первинна обмотка при постійному струмі створює номінальну напругу. А первісна швидкість крутного моменту приводу змінюється разом зі струмом. Від того, яка схема двигуна і від індуктивності його обмоток залежить час зниження лінійного моменту на більш високих швидкостях. Деякі марки двигунів, що мають ступінь захисту IP65, здатні працювати в найважчих умовах.
Якщо ви бажаєте вибрати готову модель крокового двигуна вітчизняного виробництва, зверніть увагу на основні технічні характеристики найбільш відомих моделей:
- ШД-1 – градус кроку дорівнює 15, 4 фази, крутний момент становить 40 Нт;
- ДШ-0,04А – градус кроку 22,5, 4 фази, крутний момент 100 Нт;
- ДШМ 200 – градус кроку 1,8, 4 фази, крутний момент 0,25 Нт;
- ДШ-6 – градус кроку – 18, 4 фази, крутний момент 2300 Нт.
Також серед покупців попитом користуються такі моделі, як:
При підборі потрібного двигуна, необхідно провести розрахунок параметрів потужності, напруги і крутного моменту.
Однією з проблем роботи крокового двигуна є управління приладів при відсутності контролера. Щоб з цим впоратися, слід взяти спеціальний блок логічного зв'язку, Що допомагає управляти двигуном при відсутності відповідної мікросхеми. Однак, найкраще контролювати роботу крокових двигунів за допомогою спеціального контролера.
Середня вартість крокової приводу в великих містах Росії і України
Вартість даного приладу залежить безпосередньо від таких показників, як:
 Тип двигуна;
Тип двигуна;- потужність конструкції;
- призначення.
Середня вартість однополярного крокової двигуна становить:
- Москва – 3000 у.о .;
- Санкт-Петербург – 3500 у.о .;
- Київ – 3500 у.о .;
- Харків – 4000 у.о.
Отже, ми розповіли, що таке кроковий двигун, за яким принципом він працює, на які категорії поділяється і якими властивостями відрізняється. Сподіваємося, що це полегшить ваш вибір при необхідності придбання даного пристрою.