Безколекторний двигун постійного струму
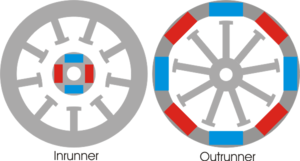
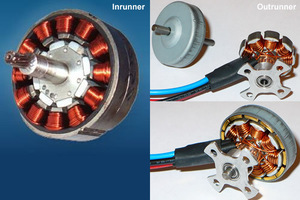 Двигуном постійного струму називають електричний двигун, харчування якого забезпечує постійний струм. При необхідності отримати високомоментного двигун з порівняно невеликими оборотами. Конструктивно Inrunners простіше через те, що нерухомий статор може служити корпусом. До нього можуть бути змонтовані кріпильні пристосування. У разі Outrunners обертається вся зовнішня частина. Кріплення двигуна здійснюється за нерухому вісь або деталі статора. У разі мотор-колеса кріплення здійснюється за нерухому вісь статора, дроти заводяться до статора через порожнисту оськоторих менше 0,5 мм.
Двигуном постійного струму називають електричний двигун, харчування якого забезпечує постійний струм. При необхідності отримати високомоментного двигун з порівняно невеликими оборотами. Конструктивно Inrunners простіше через те, що нерухомий статор може служити корпусом. До нього можуть бути змонтовані кріпильні пристосування. У разі Outrunners обертається вся зовнішня частина. Кріплення двигуна здійснюється за нерухому вісь або деталі статора. У разі мотор-колеса кріплення здійснюється за нерухому вісь статора, дроти заводяться до статора через порожнисту оськоторих менше 0,5 мм.
види електродвигунів
Існують наступні типи двигунів постійного струму:
 з порушенням за допомогою постійних магнітів;
з порушенням за допомогою постійних магнітів;- з послідовним з'єднанням якоря і обмоток збудження;
- з паралельним з'єднанням якоря і обмоток збудження;
- зі змішаним з'єднанням якоря і обмоток збудження;
- вентильний двигун (безколекторний двигун постійного струму), виконаний за допомогою замкнутої системи; в такому типі двигуна використовується інвертор (силовий напівпровідниковий перетворювач), перетворювач координат і ДПР (датчик положення ротора).
Двигуном змінного струму називають електричний двигун, харчування якого забезпечує змінний струм. Існують наступні типи двигунів змінного струму:
 гістерезисний двигун;
гістерезисний двигун;- вентильний реактивний двигун;
- асинхронний електродвигун з частотою обертання ротора, що відрізняється від частоти обертання створюваного напругою магнітного поля;
- синхронний електродвигун з частотою обертання ротора, збігається з частотою обертання створюваного напругою магнітного поля.
Також існує УКД (універсальний колекторний двигун) з функцією режиму роботи як на змінному, так і на постійному струмі.
Ще один тип двигунів – це кроковий електродвигун з кінцевим числом положень ротора. Певний зазначене положення ротора фіксується за допомогою подачі живлення на необхідні відповідні обмотки. При знятті напруги харчування з однієї обмотки і його передачі на інші відбувається процес переходу в інше положення.
Двигун змінного струму у разі живлення за допомогою промислової мережі зазвичай не дозволяє досягти частоти обертання більше трьох тисяч обертів на хвилину. З цієї причини при необхідності отримати більш високі частоти використовується колекторний двигун, додатковими перевагами якого є легкість і компактність при збереженні необхідної потужності.
Іноді також застосовують спеціальний передавальний механізм під назвою мультиплікатор, який змінює кінематичні параметри пристрою до необхідних технічних показників. Колекторні вузли іноді займають майже половину простору всього двигуна, тому електродвигуни змінного струму зменшують в розмірі і полегшують у вазі шляхом використання перетворювача частоти, а іноді завдяки наявності мережі з підвищеною частотою до 400 Гц.
Ресурс будь-якого асинхронного двигуна змінного струму помітно вище колекторного. визначається він станом ізоляції обмоток і підшипників. Синхронний же двигун при використанні інвертора і датчика положення ротора вважається електронним аналогом класичного колекторного двигуна, що підтримує роботу за допомогою постійного струму.
Безколекторний електродвигун постійного струму. Загальні відомості і пристрій приладу
 Безколекторний електродвигун постійного струму також називають трифазним вентильним двигуном.Він являє собою синхронне пристрій, принцип роботи якого грунтується на самосінхронізірованном частотному регулюванні, завдяки чому відбувається управління вектором (відштовхуючись від положення ротора) магнітного поля статора.
Безколекторний електродвигун постійного струму також називають трифазним вентильним двигуном.Він являє собою синхронне пристрій, принцип роботи якого грунтується на самосінхронізірованном частотному регулюванні, завдяки чому відбувається управління вектором (відштовхуючись від положення ротора) магнітного поля статора.
Контролери електродвигунів такого типу часто харчуються завдяки постійній напрузі, від чого і отримали свою назву. В англомовній технічній літературі вентильний електродвигун називають PMSM або BLDC.
Безколекторний електродвигун був створений в першу чергу для оптимізації любого електродвигуна постійного струму в цілому. До виконавчого механізму такого пристрою (особливо до високооборотним мікропривід з точним позиціонуванням) ставилися дуже високі вимоги.
Це, мабуть, і зумовило використання таких специфічних приладів постійного струму, безколекторні трифазні двигуни, також звані БДПС. За своєю конструкцією вони практично ідентичні синхронним двигунів змінного струму, де обертання магнітного ротора відбувається в звичайному шіхтованного статорі при наявності трифазних обмоток, а кількість обертів залежить напруги і навантажень статора. Виходячи з певних координат ротора, відбувається перемикання різних обмоток статора.
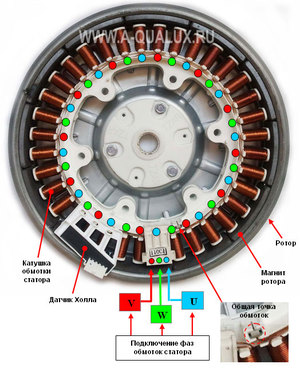
 Безколекторні двигуни постійного струму можуть існувати без будь-яких окремих датчиків, проте, іноді вони присутні на роторі, наприклад, датчик Холла. Якщо пристрій працює без додаткового датчика, то обмотки статора виконують функцію фіксуючого елемента. Тоді струм виникає завдяки обертанню магніту, коли в обмотці статора ротор наводить ЕРС.
Безколекторні двигуни постійного струму можуть існувати без будь-яких окремих датчиків, проте, іноді вони присутні на роторі, наприклад, датчик Холла. Якщо пристрій працює без додаткового датчика, то обмотки статора виконують функцію фіксуючого елемента. Тоді струм виникає завдяки обертанню магніту, коли в обмотці статора ротор наводить ЕРС.
Якщо одна з обмоток буде вимкнена, то буде вимірюватися і в подальшому оброблятися той сигнал, який був наведений, однак, такий принцип роботи неможливий без професора обробки сигналів. А ось для реверсу або гальмування такого електродвигуна бруківка схема не потрібна – достатньо буде подачі в зворотній послідовності керуючих імпульсів на обмотки статора.
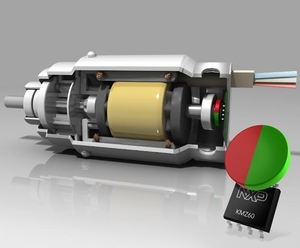
В ВД (вентильному двигуні) індуктор у вигляді постійного магніту розташований на роторі, а якірна обмотка – на статорі. Виходячи з положення ротора, формується напруга живлення всіх обмоток електродвигуна. При використанні в таких конструкціях колектора, його функцію виконуватиме в вентильному двигуні напівпровідниковий комутатор.
Основна відмінність синхронного і вентильного двигунів полягає в самосинхронизации останнього за допомогою ДПР, що обумовлює пропорційну частоту обертання ротора і поля.
Найчастіше безколекторний електродвигун постійного струму застосовується в наступних сферах:
 морозильне або холодильне обладнання (компресори);
морозильне або холодильне обладнання (компресори);- електропривод;
- системи нагріву повітря, його кондиціонування або вентиляції.
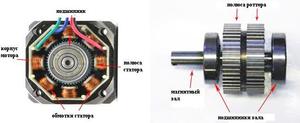
Цей пристрій має класичну конструкцію і нагадує такий же прилад асинхронної машини. До складу входить сердечник з мідної обмотки (Покладеної по периметру в пази), яка визначає кількість фаз, і корпус. Зазвичай синусної і косинусной фаз досить для обертання і самозапуску, однак, часто вентильний двигун створюють трьохфазним і навіть четирёхфазним.
Електродвигуни зі зворотним електрорушійної силою за типом укладання витків на обмотці статора діляться на два типи:
- синусоїдальної форми;
- трапецеподібні.
У відповідних видах двигуна електричний фазний струм змінюється також за способом харчування синусоидально або трапецеїдально.
 Зазвичай ротор виготовляють із постійних магнітів з кількістю пар полюсів від двох до восьми, які, в свою чергу, чергуються від північного до південного або навпаки.
Зазвичай ротор виготовляють із постійних магнітів з кількістю пар полюсів від двох до восьми, які, в свою чергу, чергуються від північного до південного або навпаки.
Найпоширенішими і дешевими для виготовлення ротора вважаються ферритові магніти, але їх недоліком є низький рівень магнітної індукції, Тому на заміну такого матеріалу зараз приходять прилади, створені з сплавів різних рідкоземельних елементів, оскільки можуть надати високий рівень магнітної індукції, що, в свою чергу, дозволяє зменшити розмір ротора.
Датчик положення ротора забезпечує зворотний зв'язок. За принципом роботи пристрій ділиться на такі підвиди:
- індуктивний;
- фотоелектричний;
- датчик з ефектом Холла.
Останній тип отримав найбільшу популярність завдяки своїм практично абсолютним безінерційним властивостями і здатності позбавлятися по положенню ротора від запізнювання в каналах зворотного зв'язку.
Система управління
Система управління складається з силових ключів, іноді також з тиристорів або силових транзисторів, що включають ізольований затвор, що ведуть до збору інвертора струму або інвертора напруги. Процес управління цими ключами реалізується найчастіше шляхом використання мікроконтролера, Що вимагає для управління двигуном величезної кількості обчислювальних операцій.
Принцип роботи
Робота двигуна полягає в тому, що контролер комутирує певну кількість обмоток статора таким чином, що вектор магнітних полів ротора і статора ортогональні. За допомогою ШІМ (широтно-імпульсної модуляції) контролер здійснює управління протікає через двигун струмом і регулює момент, який має вплив на ротор. Напрямок цієї діючої моменту визначає відмітка кута між векторами. При розрахунках використовуються електричні градуси.
 Комутацію слід проводити таким чином, щоб Ф0 (потік збудження ротора) підтримувався щодо потоку якоря постійним. При взаємодії такого порушення і потоку якоря формується крутний момент М, який прагне розгорнути ротор і паралельно забезпечити збіг порушення і потоку якоря. Однак під час повороту ротора відбувається перемикання різних обмоток під впливом датчика положення ротора, в результаті чого потік якоря розгортається у напрямку до наступного кроку.
Комутацію слід проводити таким чином, щоб Ф0 (потік збудження ротора) підтримувався щодо потоку якоря постійним. При взаємодії такого порушення і потоку якоря формується крутний момент М, який прагне розгорнути ротор і паралельно забезпечити збіг порушення і потоку якоря. Однак під час повороту ротора відбувається перемикання різних обмоток під впливом датчика положення ротора, в результаті чого потік якоря розгортається у напрямку до наступного кроку.
У такій ситуації результуючий вектор зсувається і стає нерухомим по відношенню до потоку ротора, що, в свою чергу, створює необхідний момент на валу електродвигуна.
управління двигуном
Контролер бесколлекторного електродвигуна постійного струму здійснює регулювання чинного на ротор моменту, змінюючи величину широтно-імпульсної модуляції. Комутація при цьому контролюється і здійснюється за допомогою електроніки, На відміну від звичайного щіткового двигуна постійного струму. Також поширеними є системи управління, які для робочого процесу реалізують алгоритми широтно-імпульсної модуляції і широтно-імпульсного регулювання.
Двигуни на векторному керуванні забезпечують найширший з усіх відомих діапазонів для регулювання власної швидкості. Регулювання цієї швидкості, як і підтримання потокосцепления на необхідному рівні, відбувається завдяки перетворювача частоти.
Особливістю регулювання електроприводу, заснованого на векторному керуванні, є наявність контрольованих координат. Вони знаходяться в нерухомій системі і перетворюються в обертову, Виділяючи пропорційне контрольованих параметрах вектора постійне значення, завдяки чому формується керуючий вплив, а потім зворотний перехід.
Незважаючи на всі переваги такої системи, вона супроводжується і недоліком у вигляді складності управління пристроєм для регулювання швидкості в широкому діапазоні.
Переваги і недоліки
У наш час у багатьох галузях промисловості такий тип двигуна користується величезним попитом, адже безколекторний електродвигун постійного струму об'єднав в собі чи не всі найкращі якості безконтактних і інших типів двигунів.
Незаперечними перевагами вентильного двигуна є:
- широкий діапазон в зміні частоти обертання і легкість в його регулюванні;
- енергетичні показники неймовірно високі – ККД становить понад 90%;
- безпеку при використанні в агресивному середовищі або у вибухонебезпечних місцях;
- перевантажувальна здатність украй велика;
 при роботі в режимі перевантаження електродвигуна спостерігається низький перегрів;
при роботі в режимі перевантаження електродвигуна спостерігається низький перегрів;- відсутність вимагають техобслуговування вузлів (в звичайному вентильному двигуні);
- безконтактність;
- точність позиціонування;
- динаміка і високу швидкодію;
- пусковий момент дуже великий;
- можливість використання в різних режимах (руховому і генераторному);
- висока надійність;
- довгий термін служби;
- відсутність ковзних контактів;
- високий ресурс роботи.
Незважаючи на вагомі позитивні моменти, в безколекторним електродвигуні постійного струму також є кілька недоліків:
 використання в конструкції ротора дорогих матеріалів, зокрема, постійних магнітів, призводить до високої вартості пристрою;
використання в конструкції ротора дорогих матеріалів, зокрема, постійних магнітів, призводить до високої вартості пристрою;- ресурс електронних вузлів обмежений;
- колектор зношується досить швидко, що обмежує термін служби пристрою;
- колекторно-щіткові вузли вимагають періодичного профілактичного обслуговування (в безколекторним двигуні постійного струму);
- електродвигуна властива складна для обивателя система управління.
Виходячи з вищевикладеного та нерозвиненості сучасної електроніки в регіоні, багато хто все ще вважають за доцільне використання звичайного асинхронного двигуна з наявністю перетворювача частоти.
Трифазний безколекторний електродвигун постійного струму
Такий тип двигуна має чудові характеристиками, особливо при здійсненні управління за допомогою датчиків положення. Якщо момент опору варіюється або зовсім невідомий, а також при необхідності досягнення вищого пускового моменту використовується управління з датчиком. Якщо ж датчик не використовується (як правило, в вентиляторах), управління дозволяє обійтися без провідного зв'язку.
Особливості управління трифазним безколекторним двигуном без датчика по положенню:
 розташування ротора визначають за допомогою диференціального АЦП (аналого-цифрового перетворювача);
розташування ротора визначають за допомогою диференціального АЦП (аналого-цифрового перетворювача);- струмовий перевантаження визначають також за допомогою АЦП (аналого-цифрового перетворювача) або аналогового компаратора;
- регулювання швидкості виконують за допомогою приєднаних до нижніх драйверам ШІМ-каналів;
- рекомендованими микроконтроллерами вважаються AT90PWM3 і ATmega64;
- підтримуваними комунікаційними інтерфейсами (інтерфейсами зв'язку) є УАПП, SPI і TWI.
особливості управління трьохфазним безколекторним двигуном з датчиком по положенню на прикладі датчика Холла:
- регулювання швидкості виконують за допомогою приєднаних до нижніх драйверам ШІМ-каналів;
 вихід кожного з датчиків Холла підключають до відповідної лінії введення-виведення мікроконтролера, налаштованої при змінах стану на генерацію переривань;
вихід кожного з датчиків Холла підключають до відповідної лінії введення-виведення мікроконтролера, налаштованої при змінах стану на генерацію переривань;- підтримуваними комунікаційними інтерфейсами (інтерфейсами зв'язку) є УАПП, SPI і TWI;
- струмовий перевантаження визначають за допомогою АЦП (аналого-цифрового перетворювача) або аналогового компаратора.
висновок
Безколекторний електродвигун постійного струму має масу переваг і стане гідним вибором для використання як фахівцем, так і простим обивателем.